
Fox
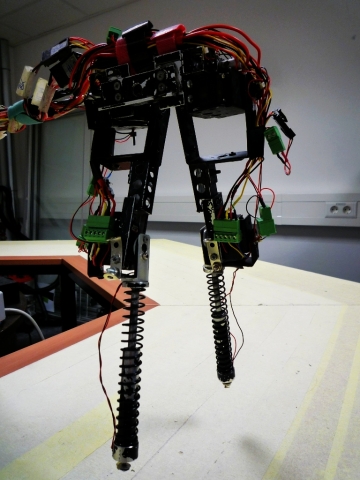
Fox is a bio-inspired dynamic bipedal walker from the Lauflabor Locomotion Lab. It consists of a trunk and two legs made of two upper rigid segments connected by a knee joint to telescopic leg springs. "Fox" posesses 4 actuated degrees of freedom: both hips and knees.
Bayesian Gait Optimization
A key challenge of bipedal locomotion is finding gait parameters that optimize a desired performance metric, such as robustness or energy efficiency.
Typically, gait optimization requires extensive robot experiments or specific expert knowledge.
We apply Bayesian optimization to automate and speed up the process of gait optimization to the bio-inspired Fox walker.
Using as metric the walking speed and reliability, 8-dimensional gait parameters are optimized.
(:youtube ualnbKfkc3Q:)
Key References
-
- Calandra, R.; Gopalan, N.; Seyfarth, A.; Peters, J.; Deisenroth, M.P. (2014). Bayesian Gait Optimization for Bipedal Locomotion, Proceedings of the 2014 Learning and Intelligent Optimization Conference (LION8).
-
- Calandra, R.; Seyfarth, A.; Peters, J.; Deisenroth, M.P. (2014). An Experimental Comparison of Bayesian Optimization for Bipedal Locomotion, Proceedings of 2014 IEEE International Conference on Robotics and Automation (ICRA).