
Our Robots
- Unitree G1 & Booster T1 Humanoids
- Unitree Humanoid H1
- KANGAROO Humanoid
- TALOS Humanoid
- Unitree Quadrupeds
- MAB Silver Badger
- DarIAS: Bimanual manipulation platform
- Iiwas: Floor-mounted bimanual manipulation platform
- KoBo: Assistive bimanual manipulation platform
- Dual Arm Barrett WAM: Robot Juggling
- Mitsubishi PA-10
- Inspire Hand
- Allegro hand with BioTacs
- Wessling Robotic Hands with BioTacs
- Quanser Platforms: Physical RL benchmark systems
Our Robots
At IAS, we have access to a lot of really great robots: three unique Barrett WAM high-speed Robot for dynamic tasks, humanoid robots of different sizes, including kid-size Unitree G1 and Booster T1, adult-size Unitree H1 and TALOS, and small-size iCub and Nao. We have multiple quadrupedal robots, including Unitree A1, two Unitree Go2 (with and without manipulator), and MAB Silver Badger, several mobile and static bimanual manipulation platform (such as TIAGo++: Bimanual mobile manipulation platform, DarIAS: Bimanual manipulation platform and KoBo: Assistive bimanual manipulation platform), a robot air hockey setup (see Iiwas: Floor-mounted bimanual manipulation platform), various Quanser Platforms as physical RL benchmark systems including a Furuta Pendulum, a Cart-Pole, a Magnetic Levitation, a Ball-Balancer, and an Omni Bundle. We also have a lot of further robot arms (e.g., several BioRobs: Compliant arms for Tetherball, a Mitsubishi PA-10, ...) and robot hands (e.g., Inspire Hands, Allegro hand with BioTacs, three Wessling Robotic Hands - one even with integrated BioTacs).
Unitree G1 & Booster T1 Humanoid Robots
Our small-sized Humanoid, Unitree G1 (130cm and 35kg, right) and Booster T1 (120cm and 30kg, left), are groundbreaking humanoid robots engineered for superior agility, versatility, and durability. The Unitree G1 robot features a total of 35 degrees of freedom (DoF), distributed as follows: 12 DoF in the legs, 3 DoF in the waist, 14 DoF in the arms, and 6 DoF in the hands. It is equipped with 3-fingered hands designed for advanced manipulation tasks. For enhanced sensing and perception, the robot integrates a 360° LiDAR and a depth camera.

The Booster T1 robot is a lightweight, robust platform specifically designed for robotics developers. The robot has 23 degrees of freedom, including 2 DoF on the head, 4 DoF on each arm, 1 DoF on the waist, and 6 DoF on each leg. With its lightweight, flexible, and robust design, it excels in performing complex tasks such as sports or technical movements like kung-fu.
The robots are located at the DFKI laboratory of the Systems AI for Robot Learning group. If you are interested in these robot systems, please contact Puze Liu!
Unitree Humanoid H1
The Unitree H1 is a full-size universal humanoid robot standing approximately 180 cm tall and weighing around 47 kg. Engineered for superior agility and speed, it achieves a walking speed of 1.5 m/s, with potential mobility exceeding 5 m/s. Equipped with advanced 360° depth sensing technology, including 3D LiDAR and a depth camera, the H1 offers precise environmental perception. Its robust design and high-performance joint motors enable it to navigate complex terrains and perform a wide range of tasks, making it suitable for various industrial and service applications.
The robot is located at the DFKI laboratory of the Systems AI for Robot Learning group. If you are interested in this robot system, please contact Aditya Bhatt!
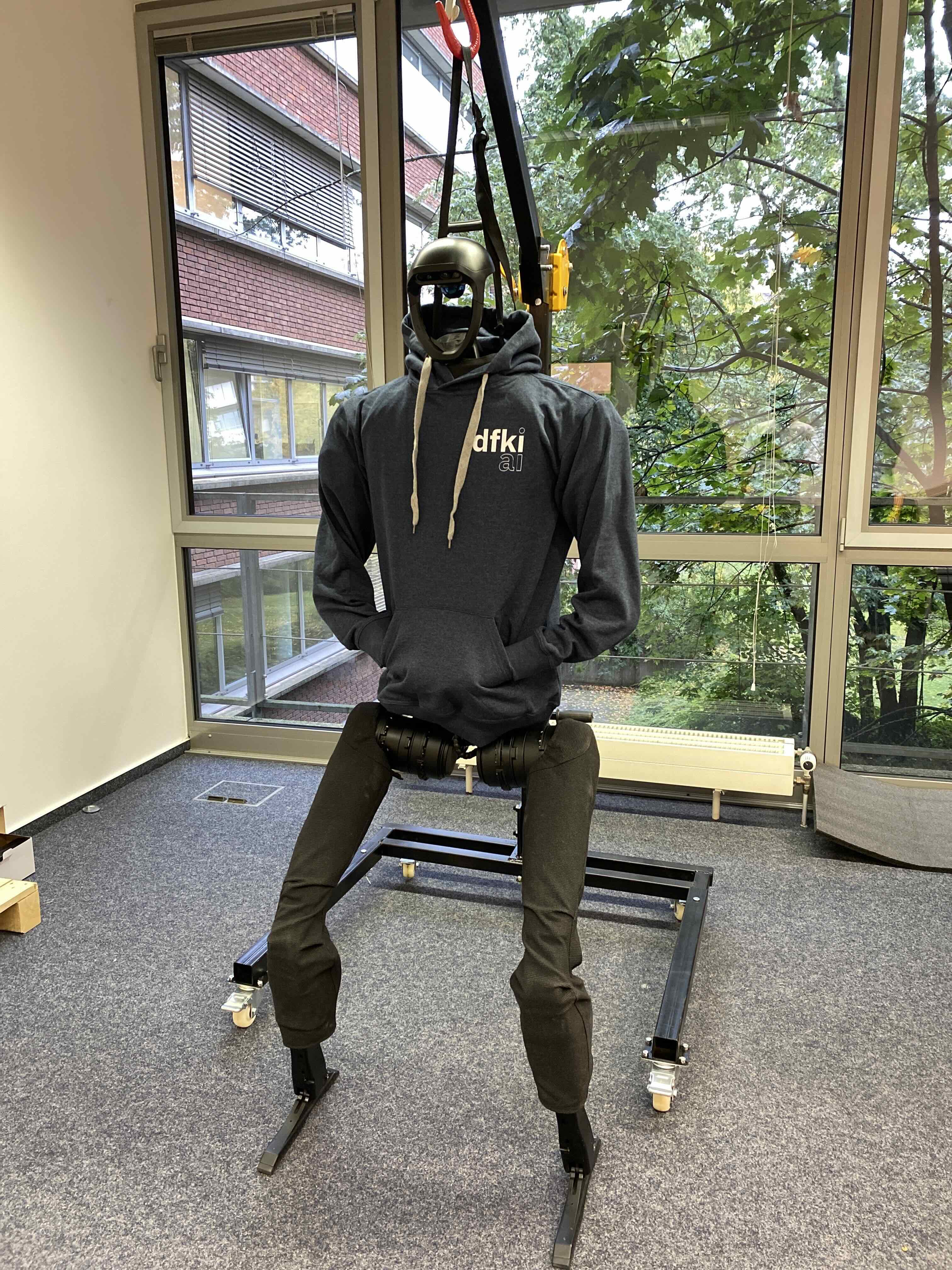
KANGAROO Humanoid

KANGAROO is PAL Robotics’ next-generation dynamic bipedal research platform, specifically designed for highly agile and impact-resilient locomotion. Unlike classical serial humanoid robots, KANGAROO features a novel hybrid serial-parallel leg architecture using high-power linear ball-screw actuators located close to the pelvis. This design significantly improves mass distribution, reduces foot inertia, and enhances robustness against impacts during dynamic motions such as jumping, hopping, and running. The lower body consists of 12 actuated degrees of freedom organized in multiple closed-loop mechanisms (hip, knee, and ankle differentials). A nonlinear transmission between knee and ankle enables efficient force amplification, allowing powerful vertical jumps while maintaining controlled foot orientation. Advanced whole-body modeling techniques allow the reduction of the full 76-DoF system into a simplified dynamic model for real-time control and operational space inverse dynamics. The platform represents a major step forward in dynamic humanoid locomotion, combining innovative mechanical design with advanced constrained multibody modeling and control.
Interested in these robot system? Please contact Oleg Arenz!
TALOS Humanoid
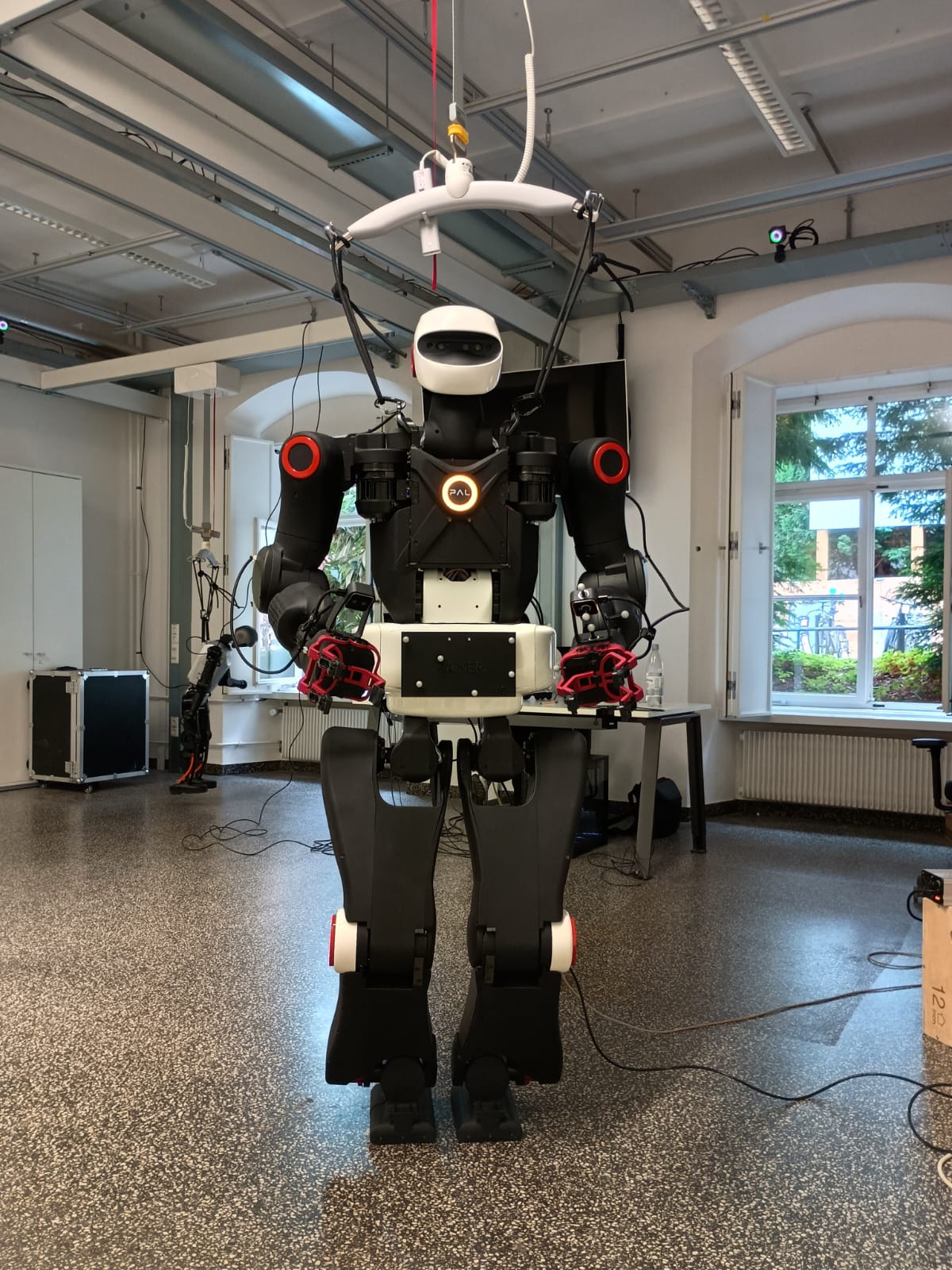
TALOS is a full-size humanoid robot developed by PAL Robotics, designed for advanced research in robotics and human-robot interaction. Standing 180 cm tall and weighing around 95 kg, TALOS features a robust and high-performance design. A defining feature of TALOS is its torque-controlled actuators, which allow for compliant and safe interaction with the environment and humans. All major joints are equipped with integrated torque sensors, providing accurate real-time feedback of joint efforts and enabling precise control of contact forces.
TALOS supports Whole-Body Control (WBC), a control framework that treats the robot's entire body as a unified system. WBC enables simultaneous coordination of tasks such as walking, balancing, and manipulation, by leveraging the full kinematic and dynamic redundancy of the robot.
Interested in these robot system? Please contact Oleg Arenz!
Unitree A1 and Go2: our new quadruped robot platforms

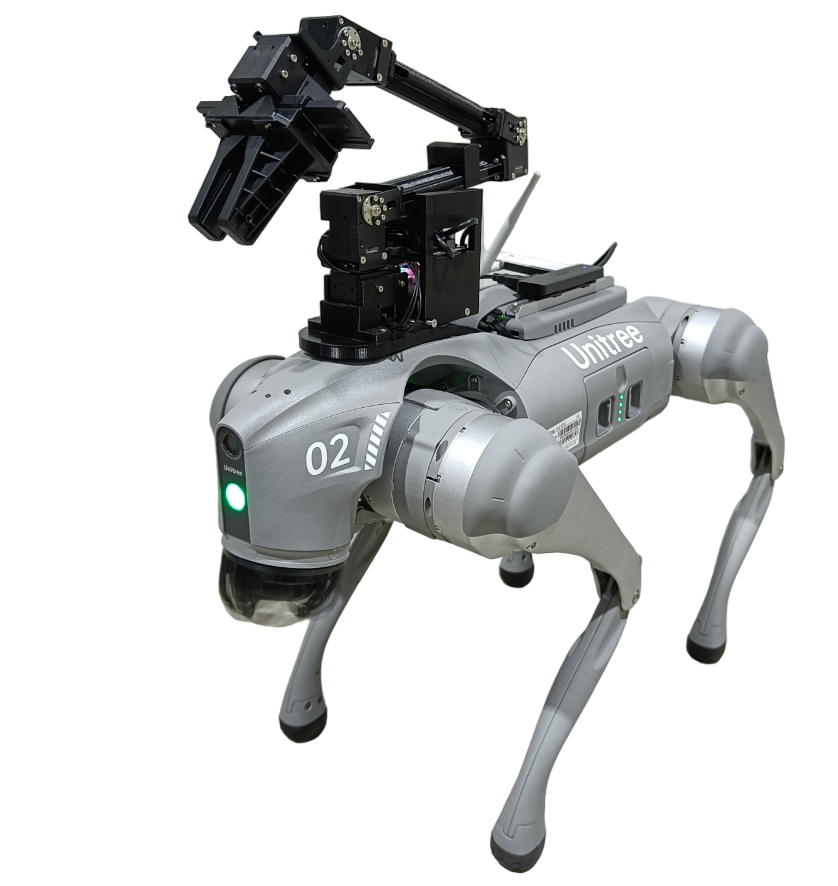
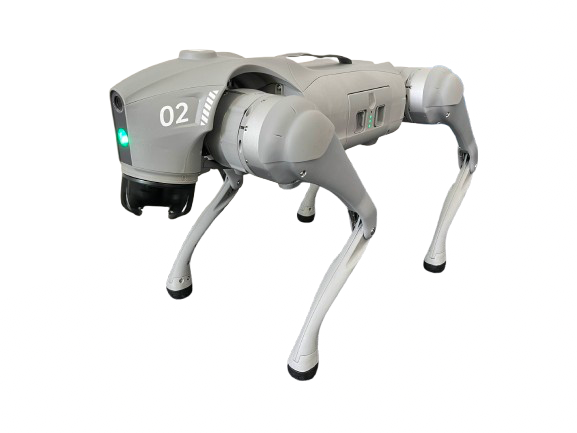
The Unitree Quadrupeds A1 and Go2 are our newest quadruped robot. Each robot is equipped with lidar and RGB(D) sensors. The robot is able to locomote in challenging environments, localize and create a map of the environment, and perform obstacle avoidance. The robot has integrated force sensors at each foot end. The robot can reach a locomotion speed up to 3.3m/s. The high construction quality and the advanced control algorithms of this robot allow it to perform backflips consistently, without failures, and without suffering structural damage. The robot can be controlled either by a human operator with a joystick or operate autonomously using the ROS middleware.
Interested in these robot systems? Please contact Davide Tateo!
MAB Silver Badger: Our quadruped with a flexible spine
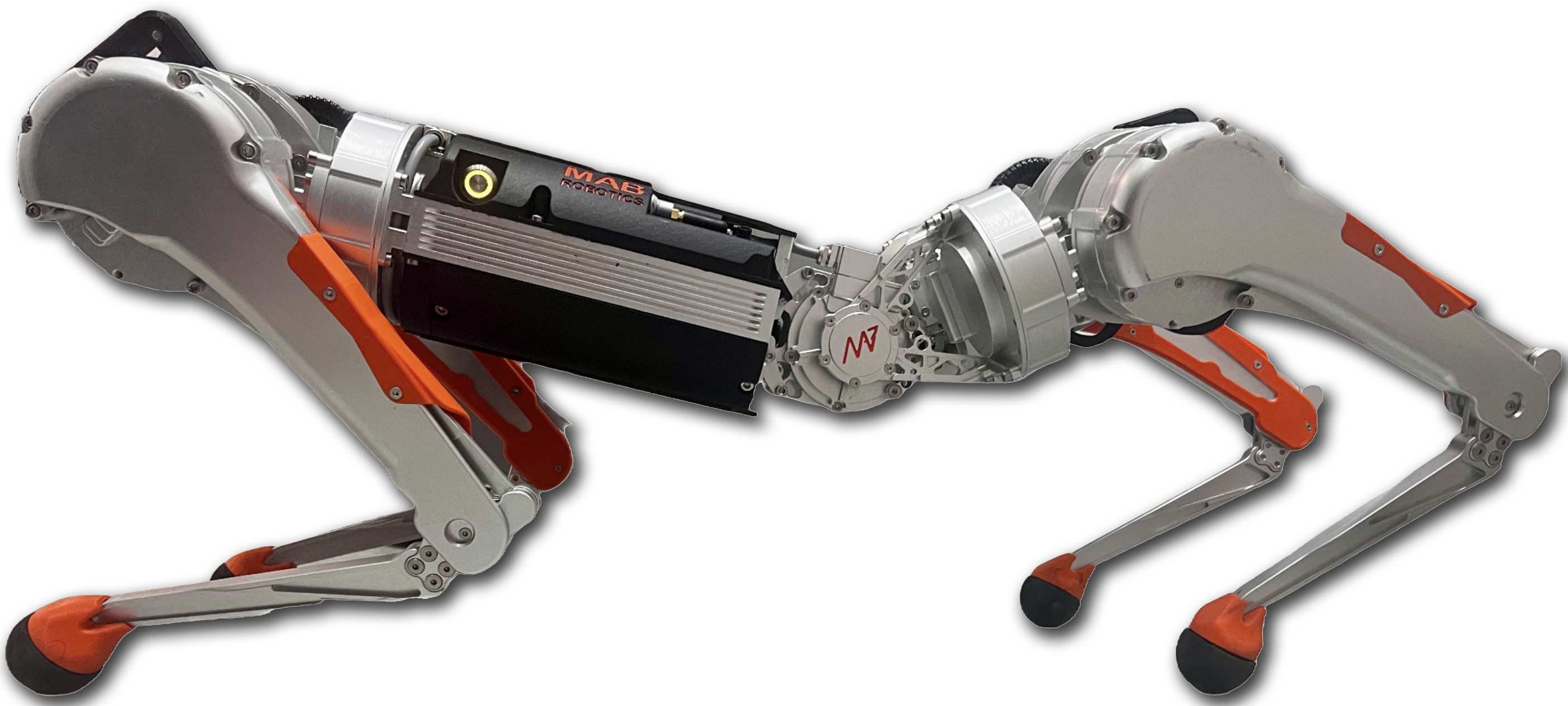
The MAB Silver Badger is our quadruped robot with a flexible spine. It is designed to be a versatile platform for research in agile and bio-inspired locomotion. The flexible spine allows the robot to perform unique dynamic movements which are not possible with traditional quadruped robots. We leverage the spine to learn agile climbing, jumping and high-speed running in challenging terrains.
Some of our work with the MAB Silver Badger:
-
- Bohlinger, N.; Czechmanowski, G.; Krupka, M.; Kicki, P.; Walas, K.; Peters, J.; Tateo, D. (2024). One Policy to Run Them All: an End-to-end Learning Approach to Multi-Embodiment Locomotion, Conference on Robot Learning (CoRL).
-
- Bohlinger, N.; Tateo, D.; Kicki, P.; Walas, K.; Peters, J. (2024). Benefits of an Actuated Spine in Agile Quadruped Locomotion, ICRA 2024 Workshop on Bio-inspired Robotics and Robotics for Biology.
Interested in these robot systems? Please contact Davide Tateo!
Darias: our Bimanual Manipulation Platform 
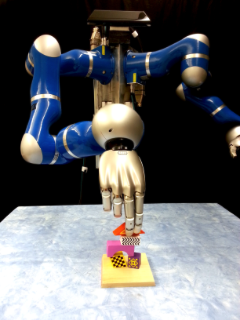
The robot Darias (DARmstadt IAS) is our main platform for research into bimanual and dexterous manipulation. The robot consists of a torso with two Kuka light weight robot arms, each of which has a five-fingered DLR hands as an end effector. For observing its envrionment, the robot is equipped with a Kinect and connected with our Optitrak system. The optitrak allows for marker-based tracking of objects and humans at a rate of 90Hz.
Each arm has seven degrees of freedom in an anthropomorphic configuration, i.e., three shoulder joints, an elbow, and three wrist joints. Communication with the robot runs at 1kHz, and allows for torque control of the robot's joints. The robot's joints are equipped with torque sensors as well as joint encoders. The robot arms are actively compliant, which allows them to be easily used for kinaesthetic teachin. The active compliance helps the robot to safely interact with its environment and with humans.
The five-fingered hands of the robot also have an anthropomorphic design. Each finger has three active degrees of freedom, including proximal and distal joints for flexing and extending the fingers, as well as a third joint in the base that allows the robot to spread its fingers apart. Similar to the robot arm, the joints of the robot's fingers provide torque information as well as the joint angle. The fingers are controlled using joint impedance control, which makes them actively compliant. This compliance of the finger, as well as the arms, allows the robot to better handle uncertainty in its surroundings .
Some of our work with Darias:
-
- Maeda, G.; Ewerton, M.; Osa, T.; Busch, B.; Peters, J. (2017). Active Incremental Learning of Robot Movement Primitives, Proceedings of the Conference on Robot Learning (CoRL).
-
- Maeda, G.; Neumann, G.; Ewerton, M.; Lioutikov, R.; Kroemer, O.; Peters, J. (2017). Probabilistic Movement Primitives for Coordination of Multiple Human-Robot Collaborative Tasks, Autonomous Robots (AURO), 41, 3, pp.593-612.
-
- Lioutikov, R.; Maeda, G.; Veiga, F.F.; Kersting, K.; Peters, J. (2020). Learning Attribute Grammars for Movement Primitive Sequencing, International Journal of Robotics Research (IJRR), 39, 1, pp.21-38.
Interested in this robot system? Please contact Cristiana Mirandade Farias!
Iiwas: Our Air Hockey Platform

We have an air hockey platform with two Kuka LBR R820 manipulators. The manipulators are similar to the LWR 4+ used by DarIAS and are impedance-controlled at a rate of 1kHz. The robots are mounted together with our Mitsubishi PA-10 on a common frame that allows for flexible arrangements. We use twelve Optitrack Primex 13 cameras for tracking the puck.
Some of our work with Iiwas:
-
- Wibranek, B.; Belousov, B.; Sadybakasov, A.; Tessmann, O. (2019). Interactive Assemblies: Man-Machine Collaboration through Building Components for As-Built Digital Models, Computer-Aided Architectural Design Futures (CAAD Futures).
Interested in this robot system? Please contact Atalay Donat or Oleg Arenz!
Kobo: Our Assistive Bimanual Manipulation Platform

We also have a another bimanual manipulation platform, consisting of two FRANKA PANDA arms and a pan tilt camera head. Both arms a equipped with a FRANKA Hand and a Intel RealSense D435 RGB-D camera is mounted on the pan-tilt head. The full system is integrated in ROS which allows for easy integration of additional sensors, such as an eyetracker or microphones.
The KoBo cell is additionally equipped with a motion tracking system that uses six Optitrack Flex 13 cameras for marker-based tracking.
Interested in this robot system? Please contact Joao Carvalho!
High-speed Barrett WAM

The Barrett WAM is a tendon-driven, back-drivable robotic arm designed for high accelerations and safe human-robot interaction, configurable with 4 or 7 degrees of freedom by attaching interchangeable wrist segments. Our lab in Darmstadt houses three ultra high-speed 160V WAM arms, all equipped with motor and joint encoders, enabling the study of highly dynamic movements beyond the reach of standard industrial and collaborative robots. Our low-level torque control interface, built on ros_control, seamlessly integrates with both a simulation environment and an OptiTrack object tracking system, enabling rapid prototyping and experimentation.
Current projects, such as juggling and pole balancing, provide motivated students with opportunities to deepen their understanding of real-time control in nonlinear dynamical systems and to apply their expertise in robot learning and machine learning to solve complex control challenges.
Some of our work with Barrett WAMs:
-
- Klink, P.; Wolf, F.; Ploeger, K.; Peters, J.; Pajarinen, J. (submitted). Tracking Control for a Spherical Pendulum via Curriculum Reinforcement Learning, Submitted to the IEEE Transactions on Robotics (T-Ro).
-
- Ploeger, K.; Lutter, M.; Peters, J. (2020). High Acceleration Reinforcement Learning for Real-World Juggling with Binary Rewards, Conference on Robot Learning (CoRL).
-
- Muratore, F.; Eilers, C.; Gienger, M.; Peters, J. (2021). Data-efficient Domain Randomization with Bayesian Optimization, IEEE Robotics and Automation Letters (RA-L), with Presentation at the IEEE International Conference on Robotics and Automation (ICRA), IEEE.
Interested in this robot system? Please contact Kai Ploeger!
Mitsubishi PA-10
Our Mitsubishi PA-10 robot is a typical industrial robot arm with seven degrees of freedom.  It has an internal PD controller with high gains, so it is position controlled. In the past, we have equipped the robot with different kinds of sensors and actuators, such as a force-torque sensor, an RGBD camera, and different kinds of tactile sensors. The PA-10 robot arm is mainly in use by the grasping and manipulation lab.
It has an internal PD controller with high gains, so it is position controlled. In the past, we have equipped the robot with different kinds of sensors and actuators, such as a force-torque sensor, an RGBD camera, and different kinds of tactile sensors. The PA-10 robot arm is mainly in use by the grasping and manipulation lab.
Some of our work with the PA 10:
-
- van Hoof, H.; Kroemer, O; Peters, J. (2014). Probabilistic Segmentation and Targeted Exploration of Objects in Cluttered Environments, IEEE Transactions on Robotics (TRo), 30, 5, pp.1198-1209.
-
- van Hoof, H.; Kroemer, O; Peters, J. (2013). Probabilistic Interactive Segmentation for Anthropomorphic Robots in Cluttered Environments , Proceedings of the International Conference on Humanoid Robots (HUMANOIDS).
-
- Kroemer, O.; Lampert, C.H.; Peters, J. (2011). Learning Dynamic Tactile Sensing with Robust Vision-based Training, IEEE Transactions on Robotics (T-Ro), 27, 3, pp.545-557.
Interested in this robot system? Please contact Oleg Arenz!

Inspire Hand
The Inspire Hands (left and right) offer unparalleled dexterity and range of motion. Its high precision and flexibility are ideal for complex robotic operations and prosthetic applications. With an integrated force sensor, this hand provides real-time feedback for precise control of grip strength, allowing for delicate handling of objects. This feature ensures accurate and sensitive operations. The Inspire Hand is engineered to handle 3 kilograms of load, combining strength with dexterity. This robust capacity ensures reliable performance in a wide range of applications, from industrial robotics to advanced prosthetic limbs.
The Inspire Hands are located at the DFKI laboratory. If you are interested in these hands, please contact Cristiana Mirandade Farias
Allegro hand
The Allegro hand has four fingers consisting of four joints each, giving the hand 16 degrees of freedom in total. This complexity enables the hand to accomplish dexterous manipulation tasks. It comes with a PD controller and is position controlled. The hand comes with sticky rubber sensorless fingertips that can grasp a variety of objects, but do not provide any sensory feedback. Thus, for in-hand manipulation tasks we equipped the hand with BioTac sensors. These are human inspired tactile fingertip sensors and can be seen on the picture here.
Find more information about the Allegro hand here.
Find more information about the BioTac tactile sensors here.
Some of our work with the Allegro:
-
- van Hoof, H.; Tanneberg, D.; Peters, J. (2017). Generalized Exploration in Policy Search, Machine Learning (MLJ), 106, 9-10, pp.1705-1724.

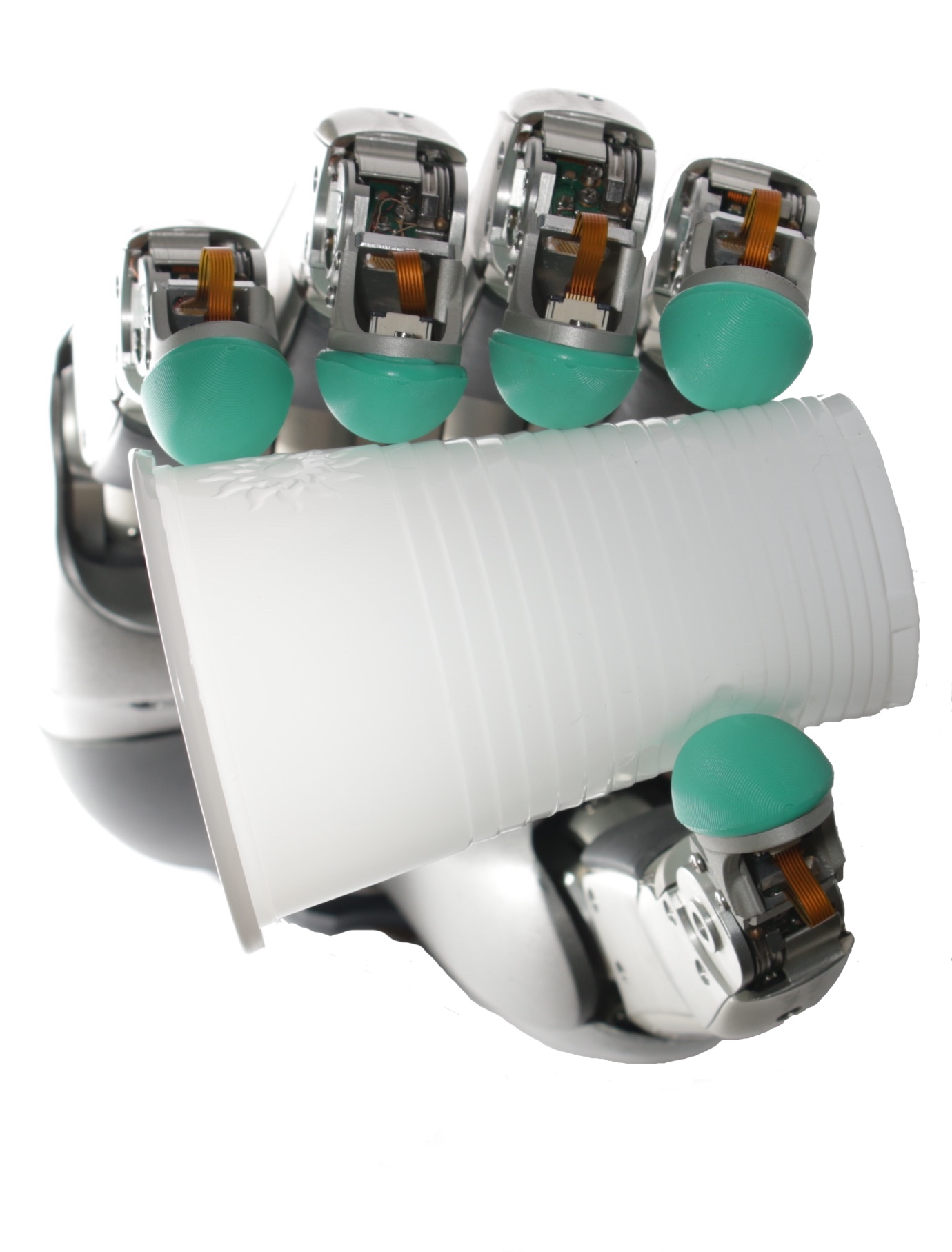
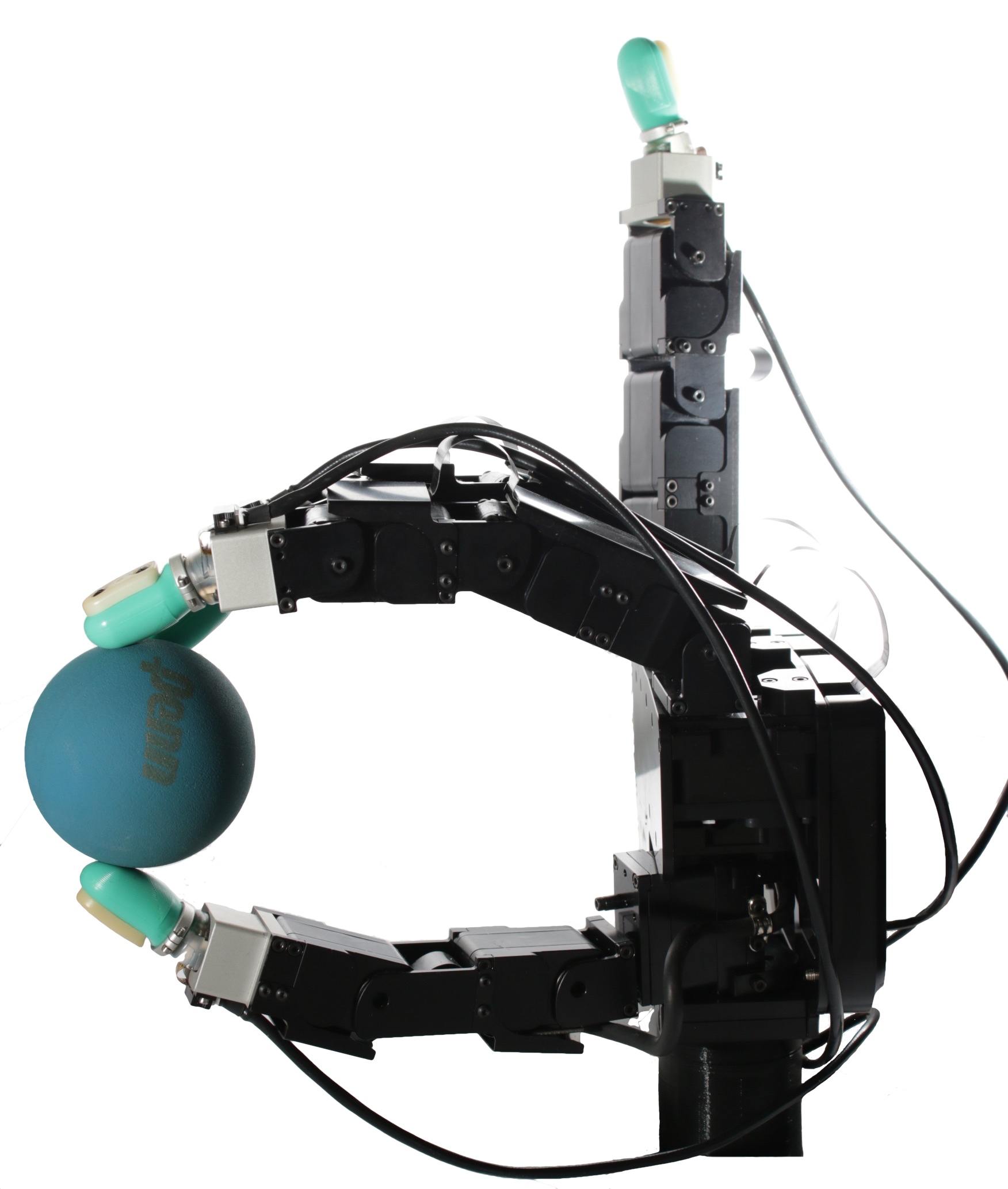
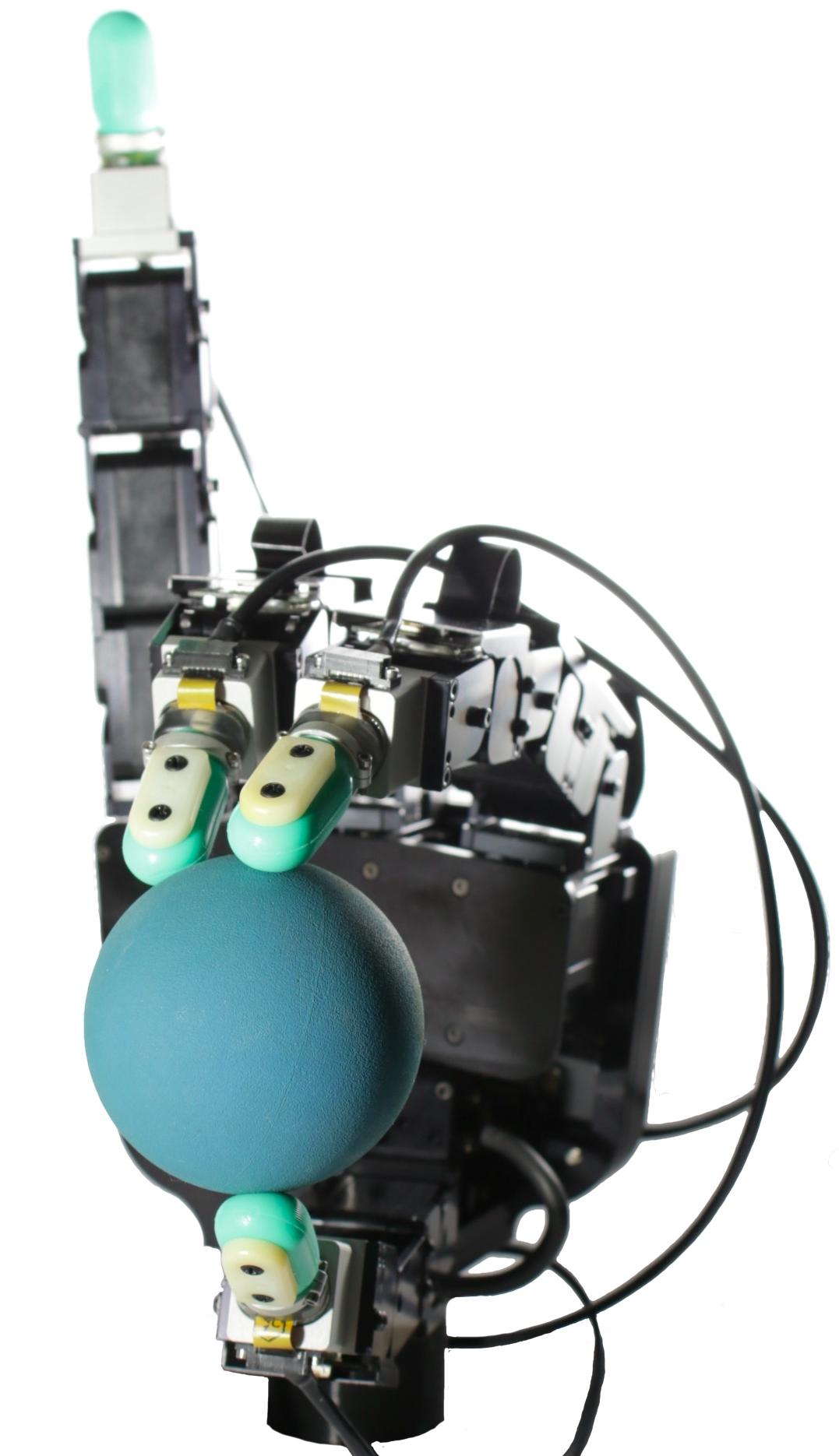
Wessling Robotics Hand
The Wessling Robotic Hand, produced by Wessling Robotics, is composed of five robotic fingers. The hand is designed as to allow the fingers to be interchangeable. Each finger consists of three actuated degrees of freedom. One of these degrees of freedom is a coupled joint controlling both the distal and proximal joints. The hand then offers 15 actuated degrees of freedom and 20 joints in total.
The fingertips of our Wessling Hand are equipped with BioTac SP sensors. These are a more recent version of the standard BioTac sensors produced by Syntouch.
For our purposes, the hand is position controlled in joint space or controlled in task space with end-effectors placed at each fingertip.
For more information concerning the Wessling Robotic Hand please visit the Wessling Robotics website.
Additional information on the BioTac SP tactile sensors can be found in the Syntouch website.
Quanser Platforms
The Quanser platforms are a set of control systems for educational purposes. In our lab, we have a Furuta pendulum, a single and a double Cart-Pole, a Magnetic Levitation, a 2DOF Ball Balancer and a haptic-device called Omni Bundle. Most of the system are classical control tasks, often used as benchmarks in optimal control and reinforcement learning. We provide a python library for an easy interaction with the platform, using an interface similar to OpenAI-Gym.
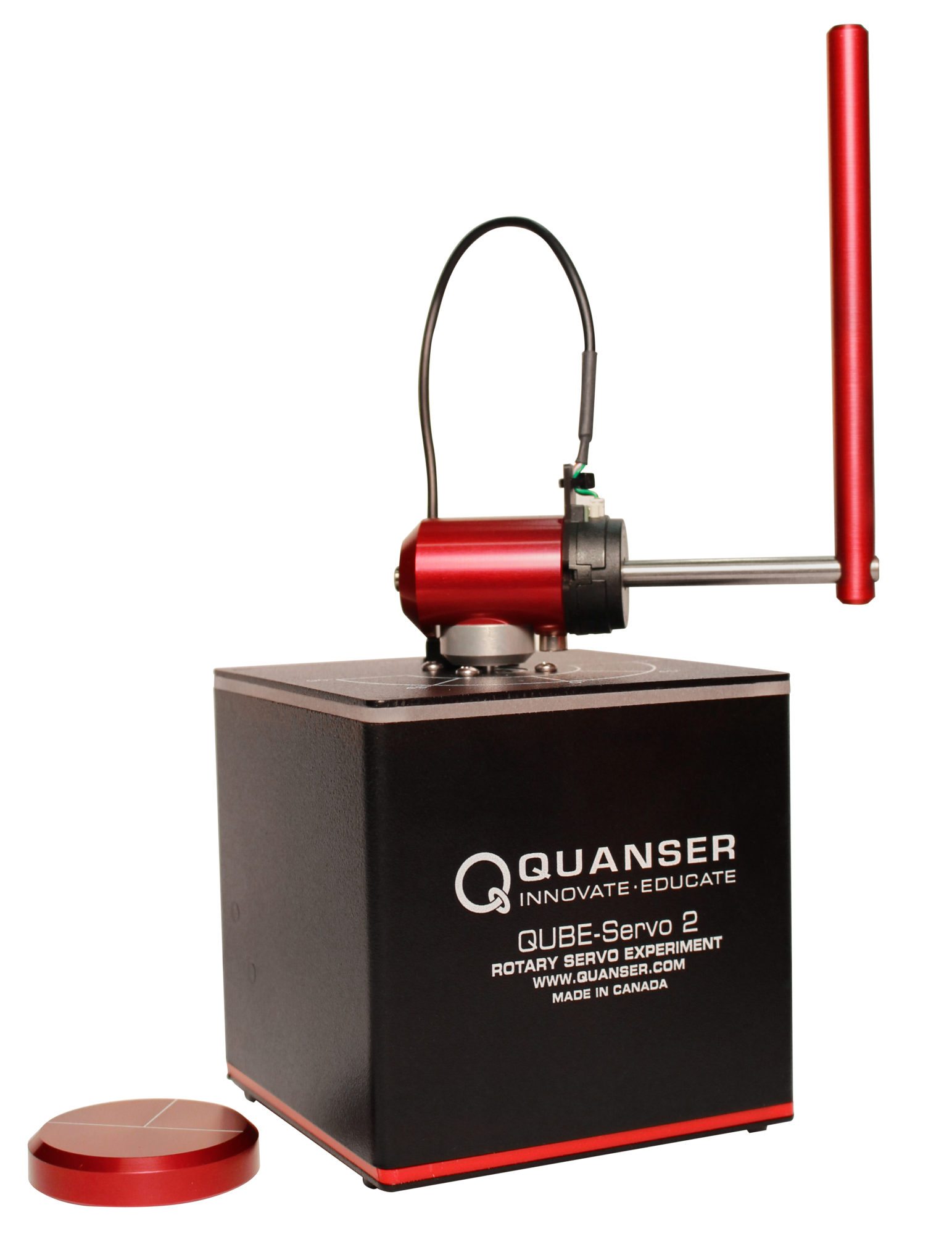
Furuta Pendulum. The Furuta-Pendulum is a rotational inverted pendulum, an under-actuated invented by Katsuhisa Furuta and colleagues at Tokyo Institute of Technology in 1992. Since then, it has become a standard research platform for demonstrating performance of linear and non-linear control laws. Robust hardware implementation by Quanser makes this platform ideal for experimentation with reinforcement learning algorithms aimed at controlling non-linear physical systems. The prototypical task is swing-up and stabilization; however, other tasks including underactuated manipulation of external objects can be defined.
Some of our work with the Furuta Pendulum:
-
- Lutter, M.; Peters, J. (2019). Deep Lagrangian Networks for end-to-end learning of energy-based control for under-actuated systems, International Conference on Intelligent Robots and Systems (IROS).
-
- Muratore, F.; Eilers, C.; Gienger, M.; Peters, J. (2021). Data-efficient Domain Randomization with Bayesian Optimization, IEEE Robotics and Automation Letters (RA-L), with Presentation at the IEEE International Conference on Robotics and Automation (ICRA), IEEE.
Interested in this platforms? Please contact Boris Belousov or Fabio Muratore!

Cart-Pole. The cart-pole is perhaps one of the most well-known control system used in control theory and in reinforcement learning. It consists of an actuated cart which can freely move on a horizontal track. It has attached one link (or two in the case of the double pendulum). Often the task consists in controlling the cart in such the way to swing the pendulum and eventually stabilize it in the up-right position.
Some of our work with the Cart-Pole:
-
- Muratore, F.; Gienger, M.; Peters, J. (2021). Assessing Transferability from Simulation to Reality for Reinforcement Learning, IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 43, 4, pp.1172-1183, IEEE.
Interested in this platforms? Please contact Michael Lutter or Fabio Muratore!

Magnetic Levitation. This platform is a classical control experiment that miniturizes the Transrapid Levittion Train. The goal is to control and stabilize a metal ball via a magentic field. The input of the system is the current passing through the coil which modulates the magnetic field. The system is highly nonlinear, but it is usually linearized around an operating point and controlled with a cascade loop. Replacing this simple controller with a nonlinear one in a reinforcement learning setup is a challenging task.
Interested in this platforms? Please contact Hany Abdulsamad!

Ball-Balancer. The Ball-Balancer can be classified as nonlinear under-actuated balancing problem with continuous 8D state and 2D action spaces. The default task is to stabilize the randomly initialized ball at the plate’s center. Given measurements and their first derivatives of the motor shaft angles as well as the ball’s position relative to the plate’s center, the agent controls two servo motors via voltage commands. The rotation of the motor shafts leads, through a kinematic chain, to a change in the plate angles. Finally, the plate’s deflection gets the ball rolling.
Some of our work with the Ball-Balancer:
-
- Muratore, F.; Gienger, M.; Peters, J. (2021). Assessing Transferability from Simulation to Reality for Reinforcement Learning, IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 43, 4, pp.1172-1183, IEEE.
Interested in this platforms? Please contact Fabio Muratore!