
Schunk Force Torque Sensor FTCL50-40

Hardware
- FTCL50-40 sensor Datasheet
- ASCII based Communication protocol Assembly and Operating Manual
- Check which Serial device is used (e.g., by running dmesg). On most of our machines it is /dev/ttyS0
- Enable read/write permissions if necessary, e.g., run sudo chmod o+rw /dev/ttyS0 or add user to dialout group
- Tell Matlab which serial ports to use: copy the java.opts file to your Matlab bin folder, e.g., to /usr/local/MATLAB/R2012a/bin/glnxa64/
- Features frame rates of up to 1000Hz
- 6 float (4 bytes) values are transmitted that are Fx, Fy, Fz, Mx, My, Mz
- The sensor can be set to zero via the java interface
- Max. 50 Hz with the 10 m cable (max. baudrate is 57600)
Matlab Interface (max. 50 Hz)
Low Cost Force Plate
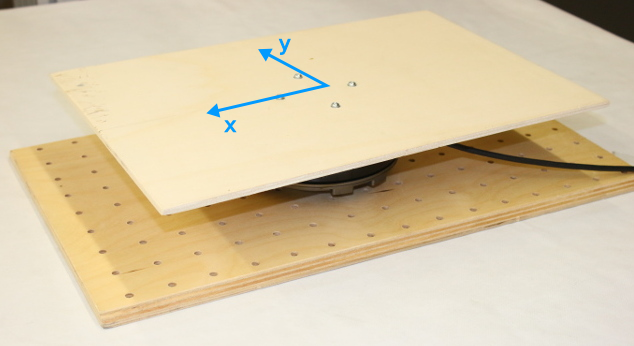
- Center of Pressure estimate: x = My/Fz and y = Mx/Fz