
Sake gripper
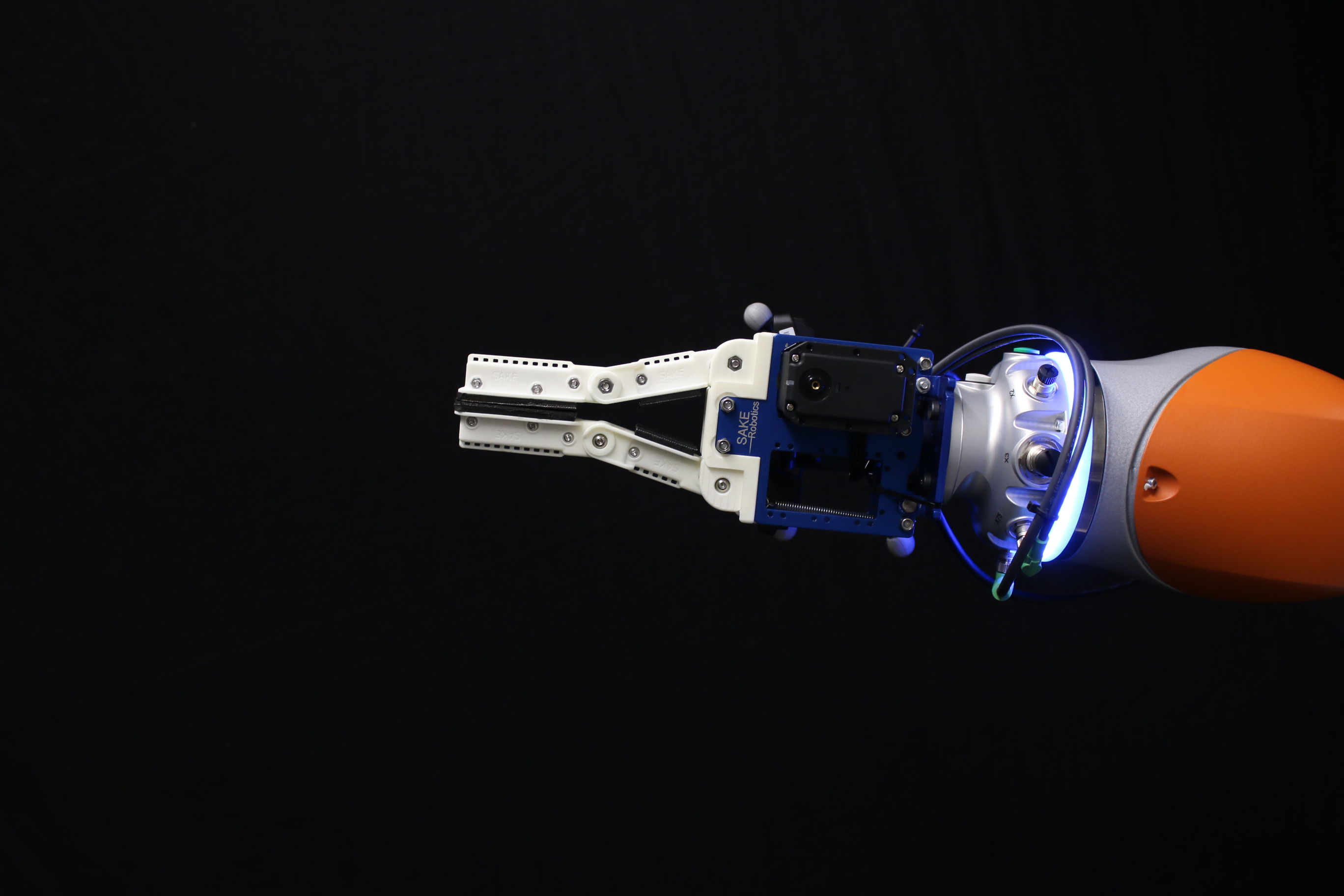

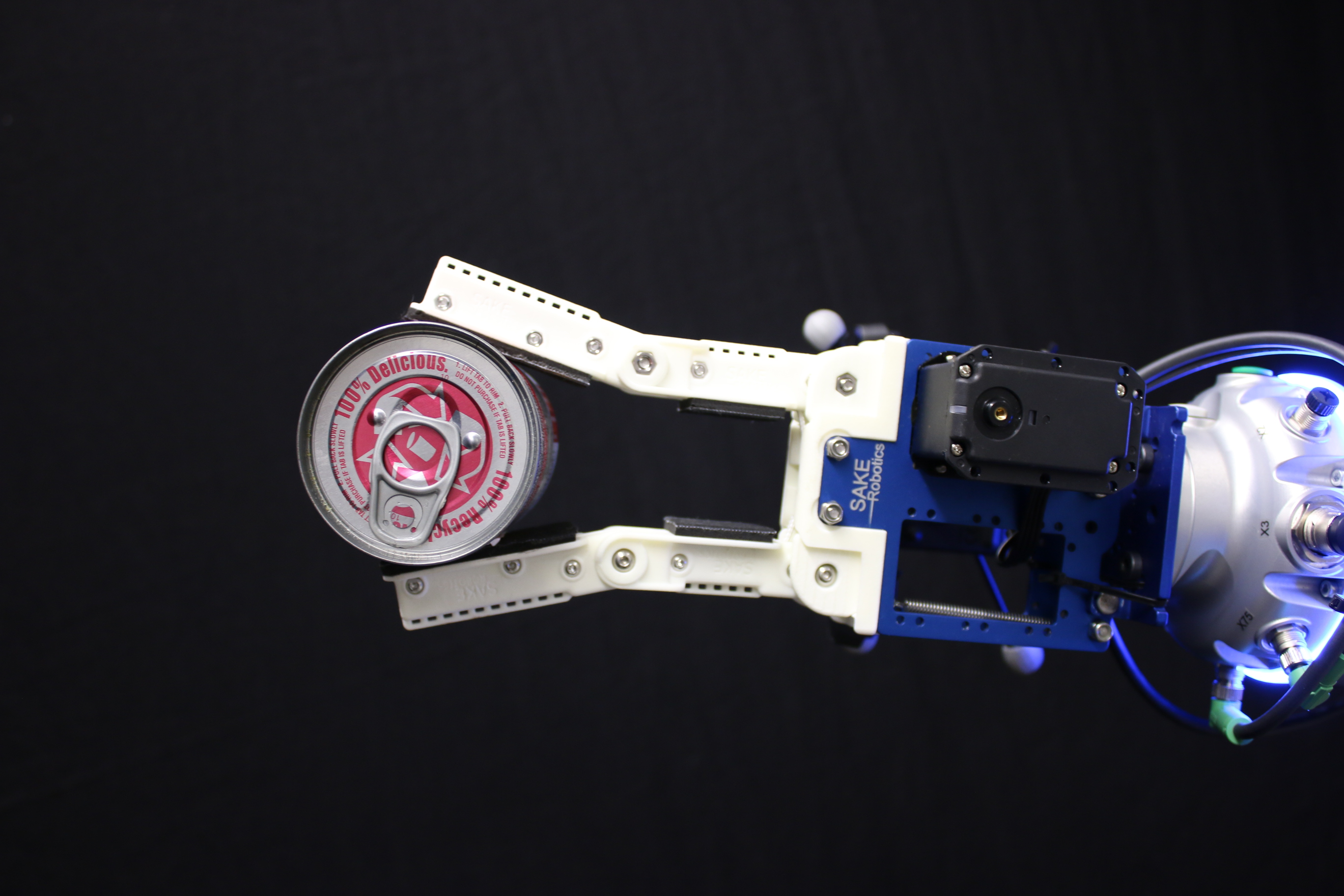
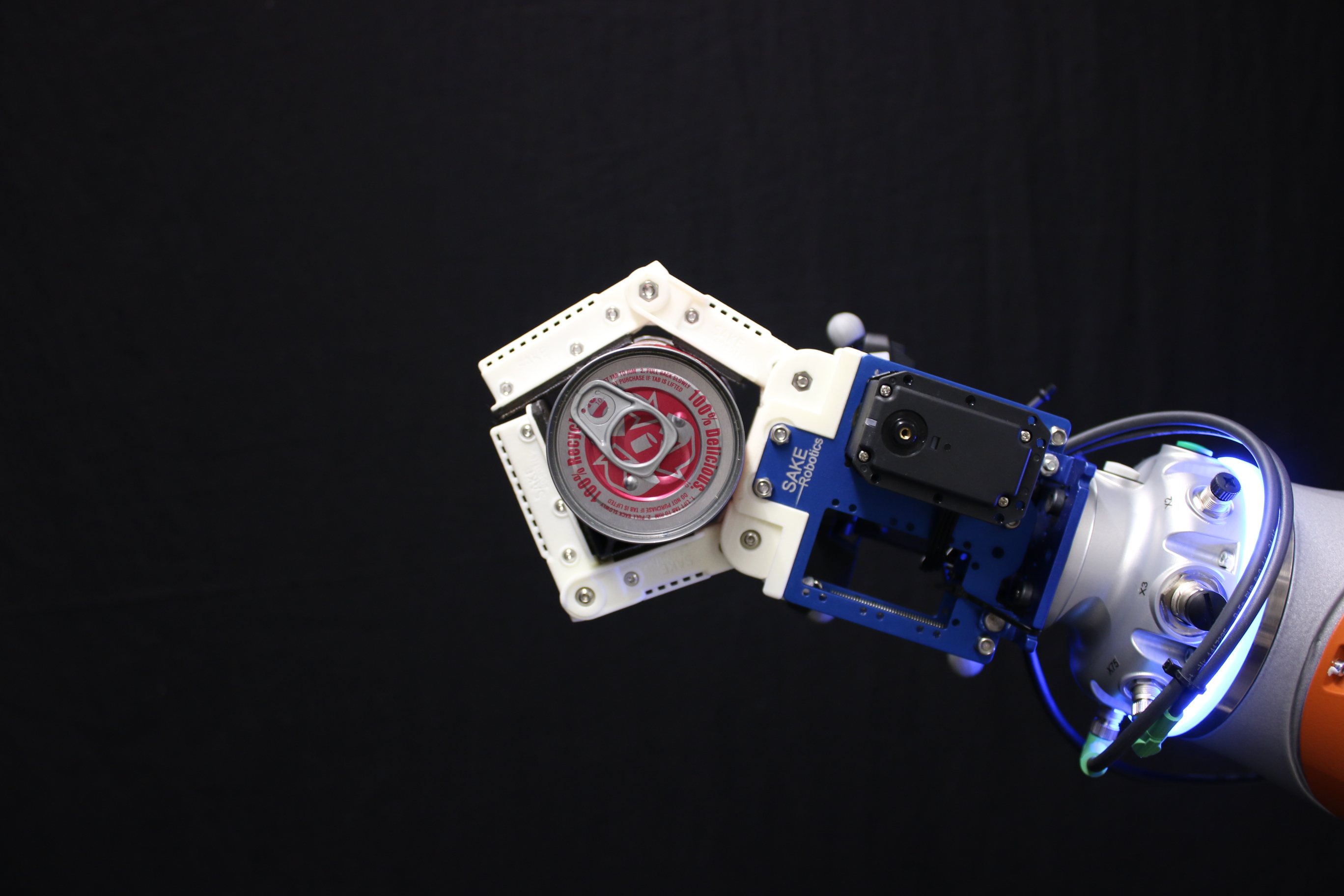
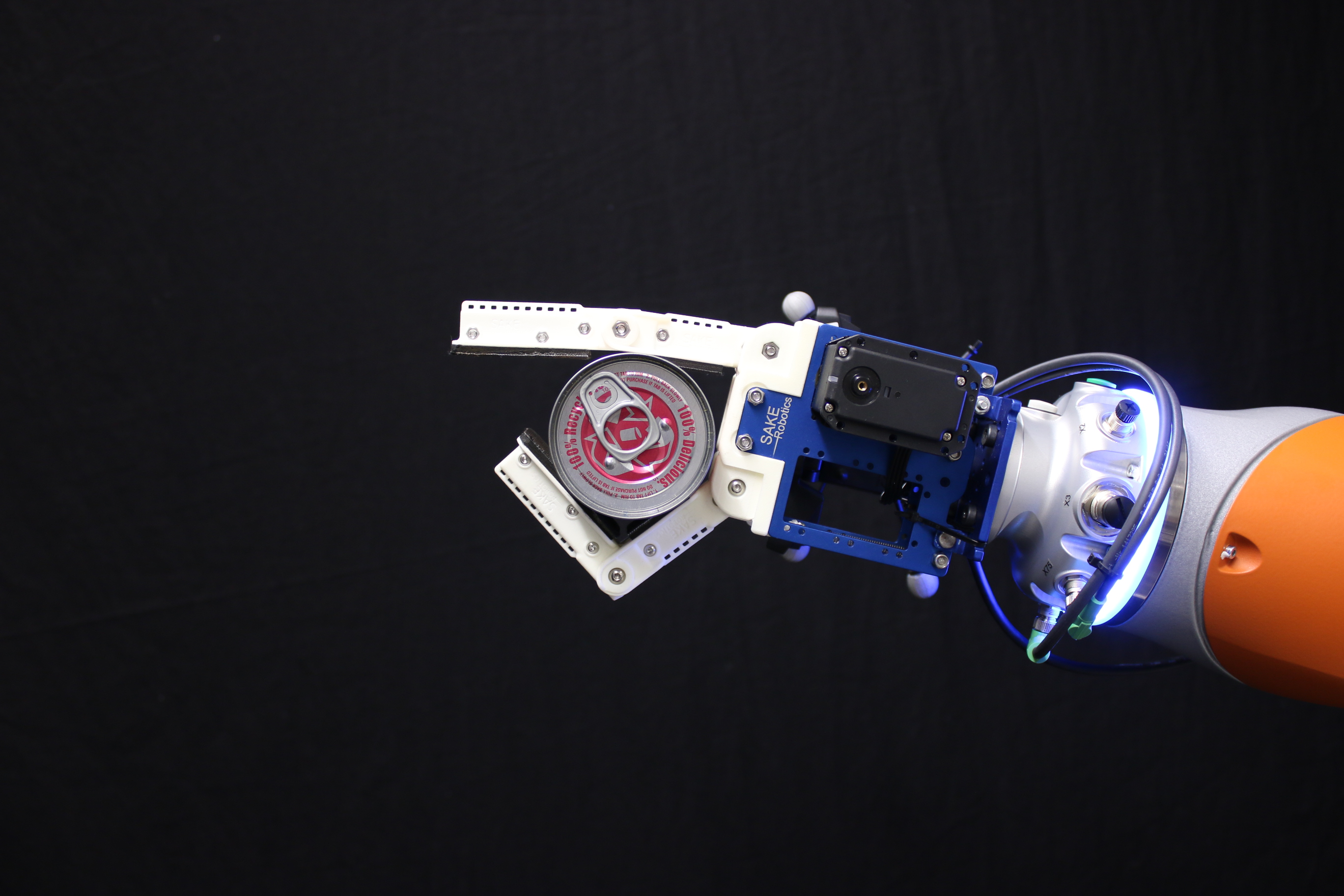
We have two grippers from SAKE robotics which can be mounted on the IIWAS platform. They have one single motor, thus one single degree of freedom to control.
There also exists self-built simulations of the grippers for V-REP and Gazebo.
Related Git Repositories
- SAKE gripper in V-REP
- IIWAS cell setup in V-REP development tested stage
- SAKE gripper in gazebo
- ROS communication interface
Interesting properties
The design of the grippers allows them to execute different grasps depending on where the object is placed and how it is shaped. Regarding only the current motor position, such different grasp types can not be distinguished.
Publications
|