
I have graduated and moved to DATA:LAB of the Volkswagen Group AI Research in Munich. You can still reach me via alex@robot-learning.de.
Alexandros Paraschos
Research Interests
Movement Primitives, Motor Control, Robotics, Autonomous Agents, Software Architectures
More Information
Publication Page Google Citations DBLP
Contact Information
Mail. TU Darmstadt, FB-Informatik, FG-IAS, Hochschulstr. 10, 64289 Darmstadt
Office. Room E226, Robert-Piloty-Gebaeude S2|02
+49-6151-16-20074
alexandros.paraschos@robot-learning.de

Alexandros Paraschos joined the Intelligent Autonomous System (IAS) lab of Technische Universitaet Darmstadt at February 2012. There, he works on Robot Learning of Complex Motor Skills under the supervision of Gerhard Neumann and Jan Peters
Previously, Alexandros has been a research associate in Cognitive Robotics Research Centre (CRRC), at University of Wales, Newport, from January 2011 working with Torbjoern Dahl. Alexandros finished his studies in Electronic and Computer Engineering at Technical University of Crete. There, under the supervision of Michail Lagoudakis, he received his diploma thesis: "Monas: A Flexible Software Architecture for Robotic Agents"
Alexandros specializes in movement representation for motor skills in humanoid robots. For humanoid robots, the ability to generate and execute complex motor plans under unstructured environments is one of the major challenges that the community faces nowadays. The lack of this ability is severely limiting robotic applications and forces as to keep robots in structured environments away from any human interaction. Alexandros aims to create the movement representation that will allow robots to share our environment, but until then he focuses on creating movement representations that not only allow composing complex robot skills out of elemental movements, but also have extensive generalization capabilities.
From June 2013, he participates in the European Union project CoDyCo
Probabilistic Movement Primitives (ProMPs)
Movement Primitives (MP) are a well-established approach for representing modular and re-usable robot movement generators. Many state-of-the-art robot learning successes are based MPs, due to their compact representation of the inherently continuous and high dimensional robot movements. 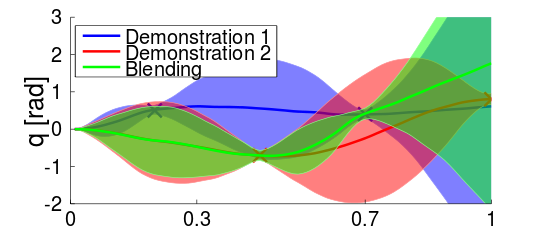 A major goal in robot learning is to combine multiple MPs as building blocks in a modular control architecture to solve complex tasks. To this effect, a MP representation has to allow for blending between motions, adapting to altered task variables, and co-activating multiple MPs in parallel. We present a probabilistic formulation of the MP concept that maintains a distribution over trajectories. Our probabilistic approach allows for the derivation of new operations which are essential for implementing all aforementioned properties in one framework. In order to use such a trajectory distribution for robot movement control, we analytically derive a stochastic feedback controller which reproduces the given trajectory distribution. We have evaluated and compared our approach to existing methods on several simulated as well as real robot scenarios.
A major goal in robot learning is to combine multiple MPs as building blocks in a modular control architecture to solve complex tasks. To this effect, a MP representation has to allow for blending between motions, adapting to altered task variables, and co-activating multiple MPs in parallel. We present a probabilistic formulation of the MP concept that maintains a distribution over trajectories. Our probabilistic approach allows for the derivation of new operations which are essential for implementing all aforementioned properties in one framework. In order to use such a trajectory distribution for robot movement control, we analytically derive a stochastic feedback controller which reproduces the given trajectory distribution. We have evaluated and compared our approach to existing methods on several simulated as well as real robot scenarios.
Key References
-
- Paraschos, A.; Lioutikov, R.; Peters, J.; Neumann, G. (2017). Probabilistic Prioritization of Movement Primitives, Proceedings of the International Conference on Intelligent Robot Systems, and IEEE Robotics and Automation Letters (RA-L).
-
- Paraschos, A.; Daniel, C.; Peters, J.; Neumann, G. (2018). Using Probabilistic Movement Primitives in Robotics, Autonomous Robots (AURO), 42, 3, pp.529-551.
-
- Paraschos, A.; Daniel, C.; Peters, J.; Neumann, G (2013). Probabilistic Movement Primitives, Advances in Neural Information Processing Systems (NIPS / NeurIPS), MIT Press.
-
- Paraschos, A.; Neumann, G; Peters, J. (2013). A Probabilistic Approach to Robot Trajectory Generation, Proceedings of the International Conference on Humanoid Robots (HUMANOIDS).
-
- Paraschos, A.; Rueckert, E.; Peters, J; Neumann, G. (2015). Model-Free Probabilistic Movement Primitives for Physical Interaction, Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS).
For all publications please see his Publication Page