
I am now a full professor and chair at MU Leoben, see my new homepage ...
Elmar Rueckert
Research Interests
Biologically Inspired Motor Skill Learning, Probabilistic Inference, Meta- or Structure Learning for Robotics, Reinforcement Learning
More Information
Curriculum Vitae Publications Google Citations Frontiers Network ResearchGate Network DBLP Academia.edu ORCID
Contact Information
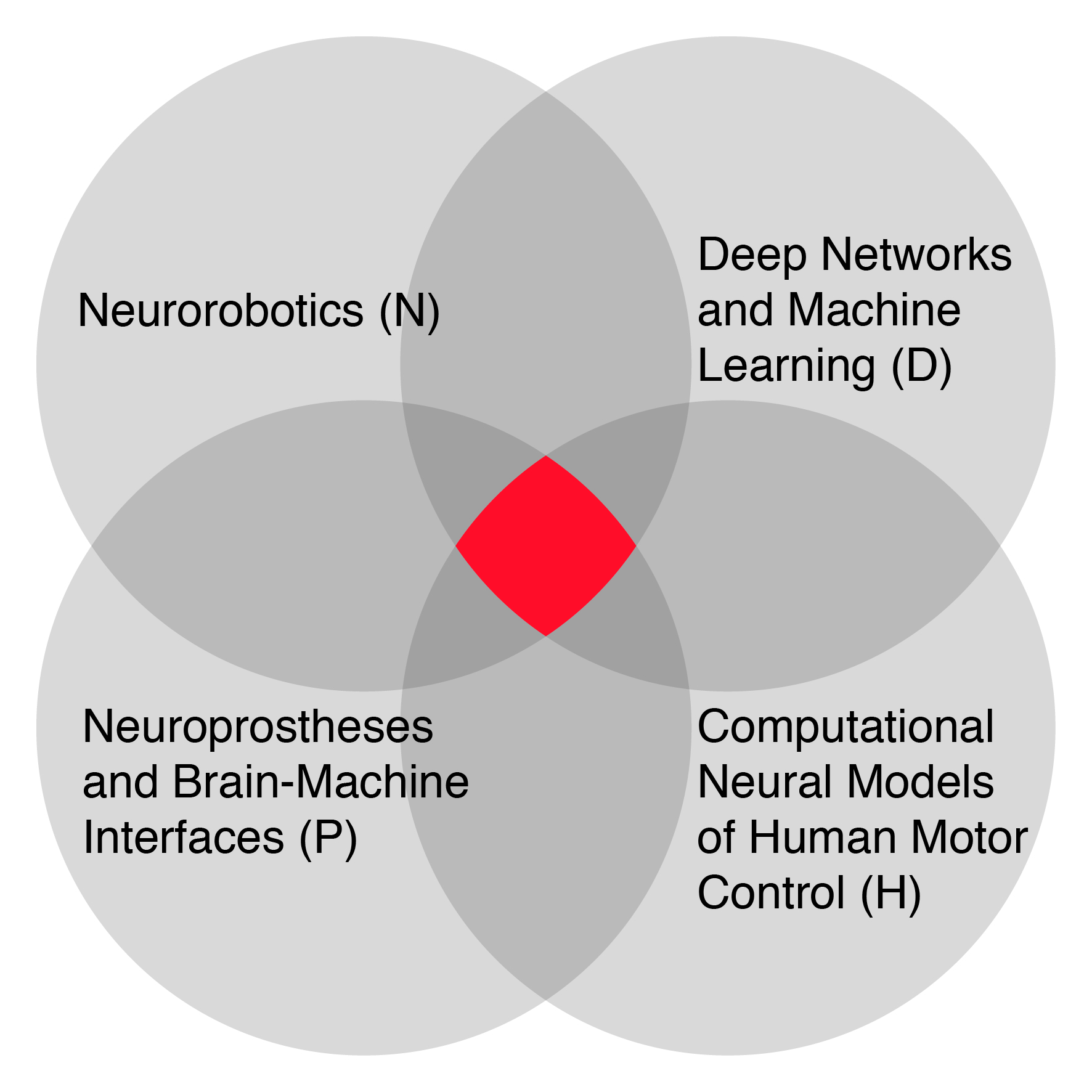
 Elmar Rueckert joined the IAS team in March 2014 as postdoctoral researcher and research group leader. He investigates computational models of the motor control system and validates them in robotic applications. A strong emphasis is put on neurorobotics (N), deep networks and machine learning (D), neuro-prostheses applications with brain-machine interfaces (P), and on computational neural models of human motor control and learning (H).
Elmar Rueckert joined the IAS team in March 2014 as postdoctoral researcher and research group leader. He investigates computational models of the motor control system and validates them in robotic applications. A strong emphasis is put on neurorobotics (N), deep networks and machine learning (D), neuro-prostheses applications with brain-machine interfaces (P), and on computational neural models of human motor control and learning (H).Before coming to Darmstadt, Elmar did his Ph.D. at the Graz University of Technology (TUG) under the supervision of Wolfgang Maass. Elmar started his Ph.D. studies in February 2010 and passed its defense with distinction in February 2014. During his Ph.D., he worked on the AMARSi project, where he developed novel reinforcement learning algorithms for motor planning using probabilistic inference, biologically inspired movement primitive representations based on muscle synergies, and investigated how networks of spiking neurons can solve motor control and motor planning problems. During his Ph.D., he also collaborated with Marc Toussaint, Andrea d'Avella, and Thomas Schack. His Thesis, "On Biologically inspired motor skill learning in robotics through probabilistic inference" concentrated on probabilistic inference for motor skill learning and on learning biologically inspired movement representations. Elmar defended his PhD thesis in February 2014.
Elmar was born in Unterpremstätten, Austria. He received his qualification for university entrance at the technical high school for electronic engineering and informatics, HTL Graz Gösting. Before doing his PhD, he finished his studies in telematics at the TUG in the year 2010. From 2012 to 2014, Elmar gave the data structures and algorithms lecture, where he received an outstanding good reputation from his students. During his Ph.D., he also supervised several student's projects on machine learning and robotics.
Research interests
Neurorobotics
- Probabilistic inference for motor planning an control
- Movement representations for motor skill learning
- Reinforcement Learning for robotics
Deep Networks and Machine Learning
Computational Neural Models of Human Motor Control
Neuroprostheses and Brain-Machine Interfaces
- Novel training schemes for Brain-Computer Interfaces
- Cybathlon related signal processing and pattern recognition
Key References
1.
Matlab Code Probabilistic Trajectory Model

2.
Matlab Code Neural Network Framework
3.
4.
5.
6.
For all publications please see his Publication Page
Videos
(:youtube XAj944lDPPQ:)
(:youtube 2rxR2TwPVxw:)
Software
- Supplementary Matlab Code to Recurrent Spiking Networks Solve Planning Tasks, The framework contains several demo programs of different sampling methods, discrete and continuous problems and illustrates the effect of online and offline learning rules. Further, we demonstrate how reinforcement learning and imitation learning can be implemented and applied to robotic tasks.
- Matlab Code MEX-Function implementation of Locally Weighted Regression (LWR) for real-time predictions of learned models.
- Matlab Code Extracting Low-Dimensional Control Variables for Movement Primitives
- Matlab Code Robust Policy Updates for Stochastic Optimal Control
- Matlab Code Sensor Glove Matlab Mex Interface
- Matlab Code Probabilistic Model of Trajectories (a sub part of ProMPs)
- OpenSim/Simtk Matlab Interface and Biped Walker Matlab Simulator used in Rueckert, E.A.; d'Avella, A. (2013). Learned parametrized dynamic movement primitives with shared synergies for controlling robotic and musculoskeletal systems, Frontiers in Computational Neuroscience, 7, 138.
Workshops and Summer Schools
- [2016, Organized by Elmar Rueckert and Martin Riedmiller] NIPS 1.5 days workshop. Title: Neurorobotics: A chance for new ideas, algorithms and approaches.
- [2014, Invited Talk] TEDUSAR Summer School. Title: An introduction to robot learning and probabilistic movement planning.
- [2011, Organized by Gerhard Neumann and Elmar Rueckert] Two days workshop. Title: Hands-on Probabilistic Inference for Motor Control.
Current Ph.D. Students
| Start | Student | Advisor | Type | Topic | Related Document(s)' |
|---|---|---|---|---|---|
| 11/2016 | Svenja Stark | Elmar Rückert, Jan Peters | Ph.D. | Intrinsic Motivation Strategies for Learning Motor Skills | |
| 10/2015 | Daniel Tanneberg | Elmar Rückert, Jan Peters | Ph.D. | Deep Neural Networks for Open-ended Robot Skill Learning |
Bachelor and Master Students
Supervised Theses and Projects at IAS
| Year | Student | Advisor | Type | Topic | Document |
|---|---|---|---|---|---|
| 2018 | Denny Dittmar | Elmar Rückert | M.Sc. Thesis | Distributed Reinforcement Learning with Neural Networks for Robotics | |
| 2017 | Viktor Pfanschilling | Elmar Rückert | B.Sc. Project | Genetic Reactive Programming | |
| 2017 | Simon-Konstantin Thiem | Elmar Rückert | B.Sc. Thesis | Simulation of the underactuated Sake Robotics Gripper in V-REP and ROS | |
| 2017 | Moritz Nakatenus | Elmar Rückert | M.Sc. Project | LSTM Networks for movement planning in humanoids | |
| 2017 | Kaushik Gondaliya | Elmar Rückert, Jan Peters, with IBM.com | M.Sc. Thesis | Learning to Categorize Issues in Distributed Bug Tracker Systems | |
| 2017 | Harun Polat | Elmar Rückert | B.Sc. Thesis | Nonparametric deep neural networks for movement planning | |
| 2017 | David Sharma | Elmar Rückert, Daniel Tanneberg, Moritz Grosse-Wentrup | M.Sc. Thesis | Adaptive Training Strategies for Brain-Computer-Interfaces | abstract pdf, pdf |
| 2016 | Lena Plage | Daniel Tanneberg,Elmar Rückert | B.Sc. Thesis | Reinforcement Learning for tactile-based finger gaiting | |
| 2016 | Mike Smyk | Elmar Rückert | M.Sc. Project | Model-based Control and Planning on Real Robots | |
| 2016 | Svenja Stark | Elmar Rückert, Tucker Hermans | M.Sc. | Learning Probabilistic Feedforward and Feedback Policies for Stable Walking | pdf Δ |
| 2016 | Jan Kohlschuetter | Elmar Rückert | M.Sc. | Learning Probabilistic Classifiers from Electromyography Data for Predicting Knee Abnormalities | pdf Δ |
| 2015 | Daniel Tanneberg | Elmar Rückert | M.Sc. | Spiking Neural Networks Solve Robot Planning Problems | pdf Δ |
| 2014 | Max Mindt | Elmar Rückert | M.Sc. | Probabilistic Inference for Movement Planning in Humanoids | pdf Δ |
| 2014 | Jan Mundo | Elmar Rückert, Gerhard Neumann | M.Sc. | Structure Learning for Movement Primitives | pdf Δ |
Supervised Theses and Projects at Technische Universitaet Graz
| Year | Student | Advisor | Type | Topic | Document |
|---|---|---|---|---|---|
| 2013 | Oliver Prevenhueber | Elmar Rückert | M.Sc. (Thesis) | Monte Carlo Sampling Methods for Motor Control of Constraint High-dimensional Systems | available on request |
| 2013 | Othmar Gsenger | Elmar Rückert | M.Sc. (Thesis) | Probabilistic Models for Learning the Dynamics Model of Robots | available on request |
| 2013 | Gerhard Kniewasser | Elmar Rückert | M.Sc. (Project) | Reinforcement Learning with Dynamic Movement Primitives - DMPs | available on request |
| 2012 | Oliver Prevenhueber | Elmar Rückert | M.Sc. (Project) | Gibbs Sampling Methods for Motor Control Problems with Hard Constraints | available on request |
| 2012 | Tim Genewein | Gerhard Neumann, Elmar Rückert | M.Sc. (Thesis) | Structure Learning for Motor Control | available on request |
| 2011 | Thomas Wiesner | Elmar Rückert | B.Sc. (Thesis) | Ein Vergleich von Lernalgorithmen für Parametersuche im hochdimensionalen Raum | available on request |