
Seminar: Humanoid Robotics
Quick Facts
| Lecturer: | Oleg Arenz |
| Meetings: | Over Zoom |
| Language: | English |
| Questions: | oleg.arenz@tu-darmstadt.de |
| TUCaN: | 20-00-1125-se Humanoid Robotics |
| Presentation of Topics: | 20.10.2023 10:00 (slides) |
| Deadline for Topic Preferences: | 23.10.2023 23:59 |
| Topic Assignment: | 27.10.2023 23:59 |
| Deadline for Report: | 08.03.2024 23:59 |
| Deadline for Poster: | 15.03.2024 10:00 (via mail) |
| Poster Session: | 15.03.2024 10:00 (in S202|B002) |
| Credits: | 3,0 |
Introduction
Robots are on the rise and will increasingly support us during our daily lives. While today's personal robots, such as robotic vacuum cleaners or lawn mowers, rely on a task-specific hardware design, future personal robots will need to be more flexible, so they can assist us with a variety of tasks. In particular, anthropomorphic robots (humanoids), i.e., robots that roughly follow the kinematic structure of humans, are of interest because they will be able to operate in a human environment. However, today's humanoids are not yet viable for personal assistance due to limitations in both hardware (e.g. in terms of robustness, and energy- and cost-efficiency) and software (e.g. in terms of control, reasoning, and the generalizability and transferability of skills). In this seminar, we will discuss the latter problems: You will select one of the many methodological challenges; through a review of the literature, supported by one of our research assistants, you will gain an understanding of the respective state-of-art approaches and their limitations. At the end of the seminar, you will share your acquired knowledge with other students in a peer teaching event (a poster session) and by writing a short article.


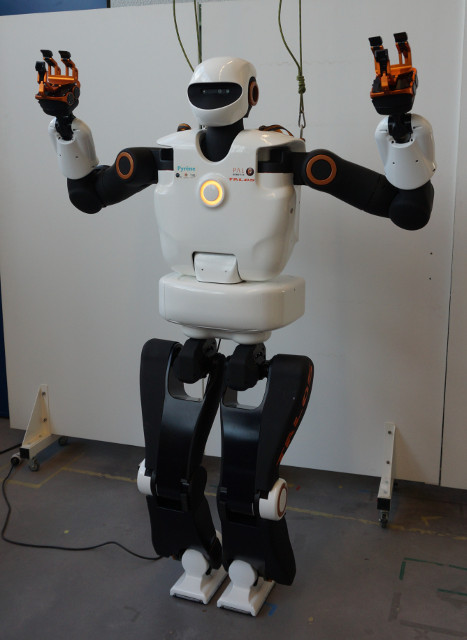
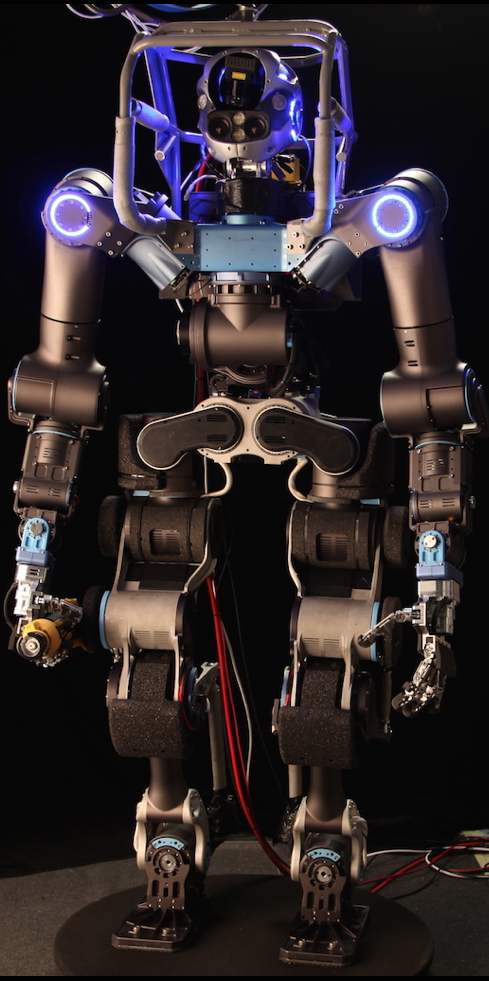
From left to right: NASA VALKYRIE, DLR TORO, PAL Robotics TALOS, IIT WALKMAN.
Images taken from 1) NASA, 2) J. Englsberger u. a., „Overview of the torque-controlled humanoid robot TORO“, Humanoids 2014. 3) O. Stasse u. a., „TALOS: A new humanoid research platform targeted for industrial applications“, Humanoids. 2017. 4) N. G. Tsagarakis u. a., „WALK-MAN: A High-Performance Humanoid Platform for Realistic Environments“. Journal of Field Robotics, 34(7). 2017.
Scope
Possible topics will be presented during our kick-off meeting. However, we encourage you to propose a topic related to the theme of the seminar, that you are particularly interested in. Please send suggestions to oleg.arenz@tu-darmstadt.de.
Both more general topics (e.g., review of bipedal locomotion) and more specific topics (e.g., current methods for centroidal trajectory optimization) can be explored. The following is a non-exhaustive list that sketches the scope of this seminar.
- Bipedal Locomotion
- Whole-Body Control
- Sim2Real
- Manipulation
- Robot Perception
- Scene Understanding
- Trajectory Optimization
- Human-Humanoid Interactions
- Learning from Demonstrations
- Footstep Planning
Requirements
Concurrent or prior enrollment in the course "Foundations of Robotics" and/or "Robot Learning" is recommended.
Format
During the kick-off meeting (20.10.) our teaching assistants will present topics. Shortly after, you can select topics of interest and get a topic assigned to you. You will regularly meet with your assigned teaching assistant to discuss the literature, striving to either gain expert knowledge in a narrow topic or general knowledge in a broader topic. At the end of the term, you will summarize your findings in an article of 4 to 8 pages. Furthermore, a poster session will be organized where you present your insights to fellow students. The grade is based on the report (75%) and poster (25%).
Topic Assignments
| Student Name | Topic | Advisor | Report |
|---|---|---|---|
| Martina Gassen | Gait Embeddings | Oleg Arenz | |
| Alvin Abduh | Optimal reduced-order modeling of bipedal locomotion | Junning Huang | |
| Adriaan Mulder | Imitation Learning for Bimanual Manipulation | Michael Drolet | |
| Henri Beyer | Controlling Humanoids A Comprehensive Analysis of Teleoperation Frameworks | Kay Hansel | |
| Lu Liu | Learning Natural Locomotion from Demonstrations | Michael Drolet | |
| Simon Giegerich | Bipedal Locomotion for Football | Paul Jansonnie | |
| Qiao Sun | Reinforcement Learning for Humanoid Locomotion | Nico Bohlinger | |
| Joshua Johannson | From Pendulum Models to MPC with Centroidal Dynamics | Oleg Arenz |
Schedule for Poster Session
There will be 8 time slots of 10 minutes each. During each slot there will be 4 presenting students and 4 attending students. For the four presentations we will use two smart boards, a PC with Monitor, and a Laptop with projector. When and where to present can be taken from the table below.
| Name / Time Slot | 10:05 - 10:15 | 10:15 - 10:25 | 10:25 - 10:35 | 10:35 - 10:45 | 10:45 - 10:55 | 10:55 - 11:05 | 11:05 - 11:15 | 11:15 - 11:25 |
|---|---|---|---|---|---|---|---|---|
| Martina Gassen | smart (L) | smart (L) | smart (L) | smart (L) | ||||
| Alvin Abduh | smart (R) | smart (R) | smart (R) | smart (R) | ||||
| Adriaan Mulder | PC | PC | PC | PC | ||||
| Henri Beyer | Projector | Projector | Projector | Projector | ||||
| Lu Liu | smart (L) | smart (L) | smart (L) | smart (L) | ||||
| Simon Giegerich | smart (R) | smart (R) | smart (R) | smart (R) | ||||
| Qiao Sun | PC | PC | PC | PC | ||||
| Joshua Johannson | Projector | Projector | Projector | Projector |
Templates
For the report, we recommend the ICRA template.
For the poster, we provide an SVG template (open with Inkscape) as an inspiration.
{kind=link}